Introduction
# 5.7069 (Safety Controller Error)
The difference between the Incremental encoder and the Absolute encoder values exceeds limit range.
Symptom
Switched to STO, Robot stops
Cause
Incremental Encoder and Absolute Encoder values increase by more than 5 degrees
Action Method
Report the problem to the customer service department and reboot the system
Re-install the Safety Controller software
If the problem occurs repeatedly, replace the Robot joint module
Required Information
Not applicable
Steady State
Incremental Encoder and Absolute Encoder values increase by less than 5 degrees
# 4.1017 (Robot Inverter Error)
Absolute Encoder CRC Error
Symptom
- Message alarm
- Robot stops
Cause
Absolute encoder BiSS CRC error
Action Method
1. This error occurs due to communication failure of the absolute encoder.
2. Turn the robot power off and start again.
3. If the error continues, take it as encoder malfunction and request diagnosis to the A/S department of the main office.
Required Information
- None
Steady State
N/A
# 5.7001
RS422 communication sequence number error
Symptom
Robot stops in SS1 stop mode (switched to STO after deceleration)
Cause
This may occur if the sequence number of the command sent by the TP does not increment by 1, or it the data is arbitrarily changed due to the serial communication problem.
Action Method
Make sure that the Cable/Connector connections are correct.
If the problem occurs repeatedly, replace the Safety Controller board
Required Information
Not applicable
Steady State
The sequence number is incremented by 1 each time the command is transmitted
-
-
Lookup for the error in DART-Studio troubleshooting guide or Doosan Robotics LAB website
-
Report the problem to the customer service department / dealer / Doosan Robotics team.
-
If you get the 4.1017 error you can identify in which joint the issue has occurred. Eg
-
As the Log Msg showing Param:5, there is a connection error at 5th Joint.
-
-
-
Doosan Robotics would recommends to check the ABS Encoder Cable by plug out and plug back in.
-
-
-
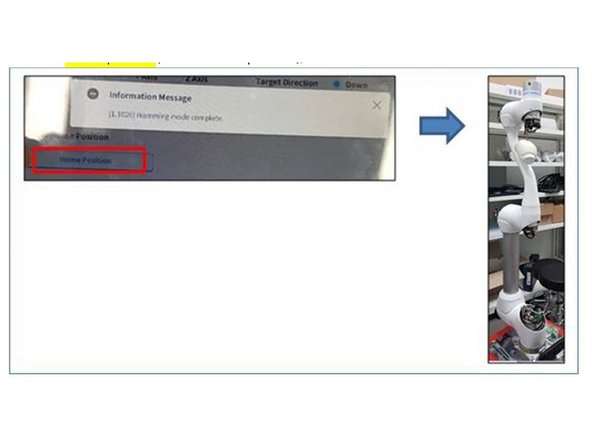
Home the cobot (zero position)
-
Turn off the robot and unplug the power cord from the outlet
-
-
-
Insert wisdom here.
-
-
-
Insert wisdom here.
-
-
-
Insert wisdom here.
-
-
-
Insert wisdom here.
-
-
-
Insert wisdom here.
-
-
-
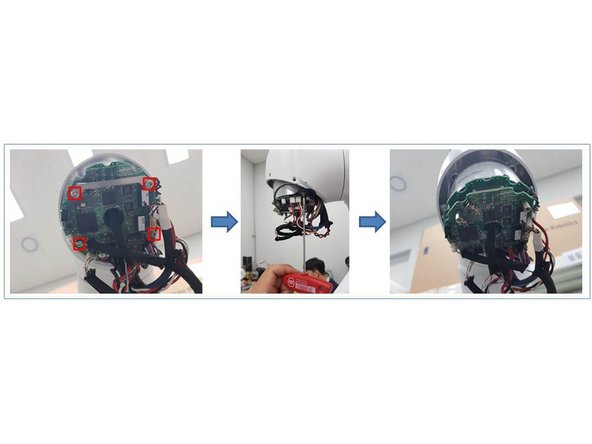
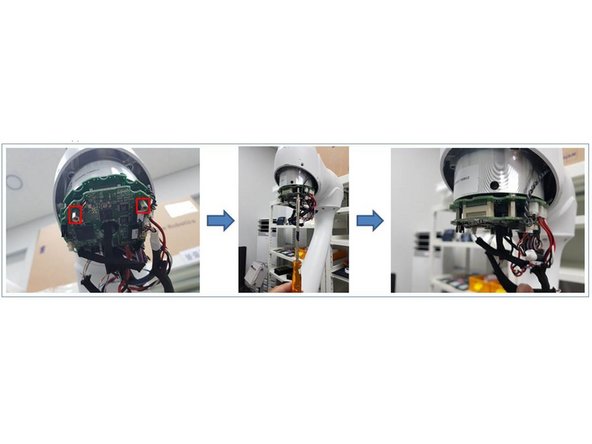
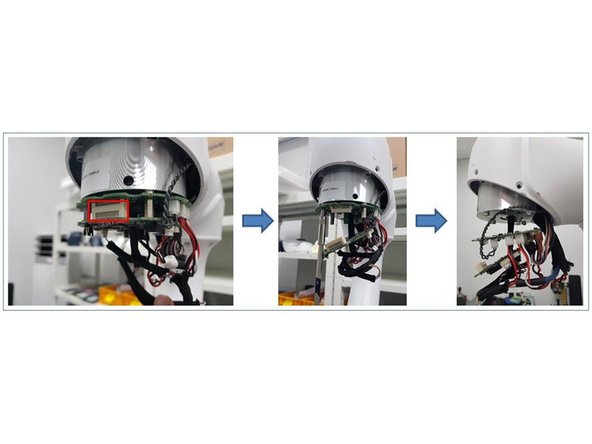
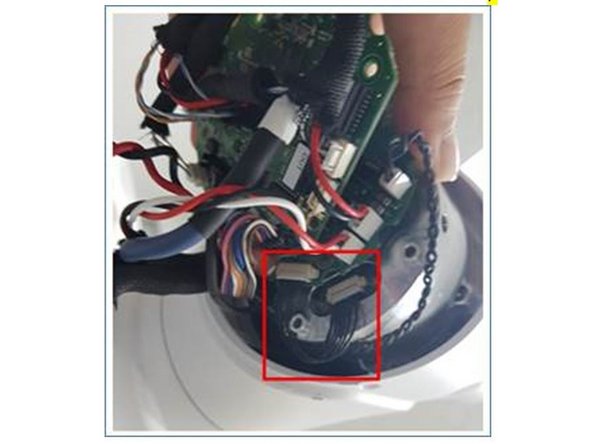
Please take a photo before
-
Carefully disconnect and plug back ABE header cable
-
-
-
Insert wisdom here.
-