-
-
Set the new gripper (if necessary)
-
Make sure you have set the correct TCP and tool weight of the end arm tool
-
-
-
Enable the gripper
-
-
-
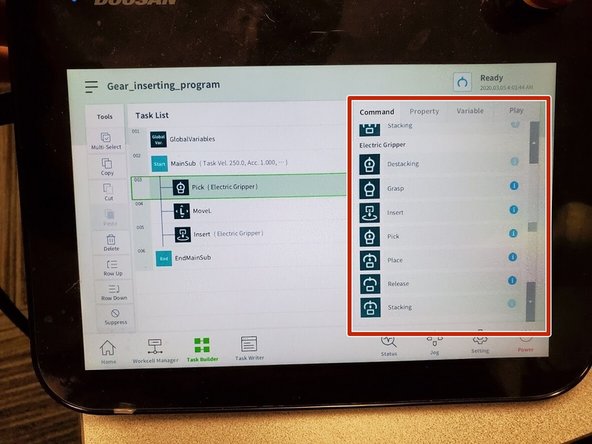
Before to start building the program make sure the skills of your gripper are displayed on the command tab
-
-
-
Add “Pick” skill then record the position by clicking on Picking Pose ʘ located in Property tab
-
-
-
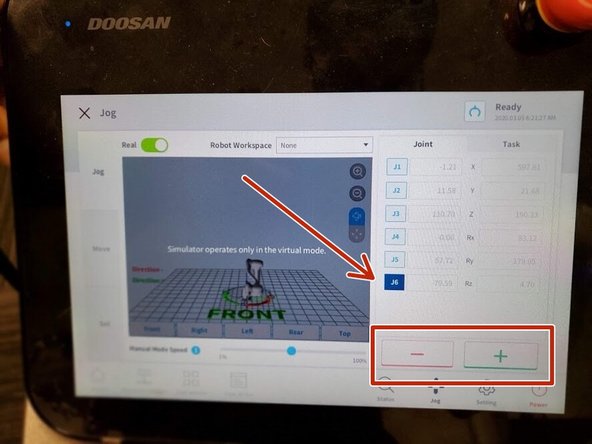
Add a new move and rotate Joint 6 to misaligned the gear from its picking pose so when inserting the gear back it does not match the same gaps.
-
-
-
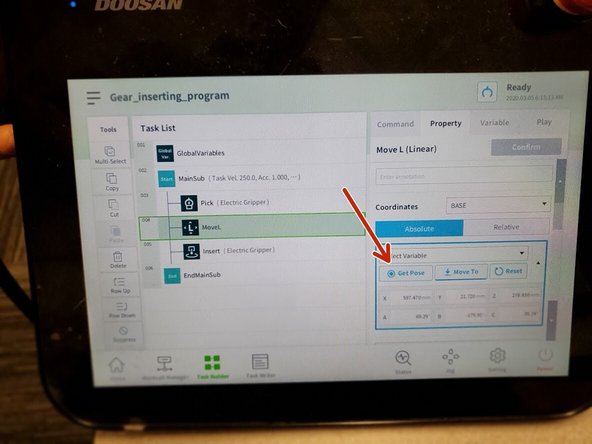
Click on Get Pose ʘ to record that new position
-
-
-
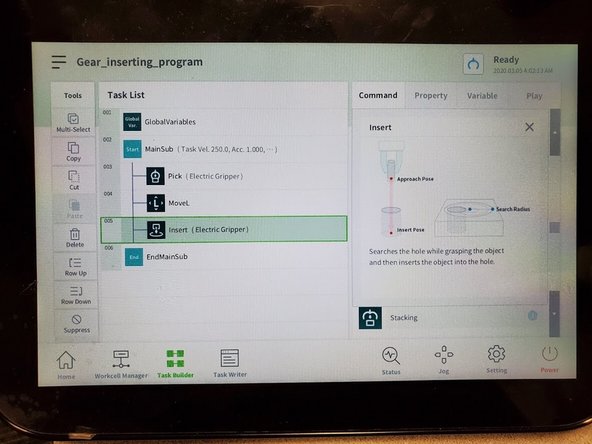
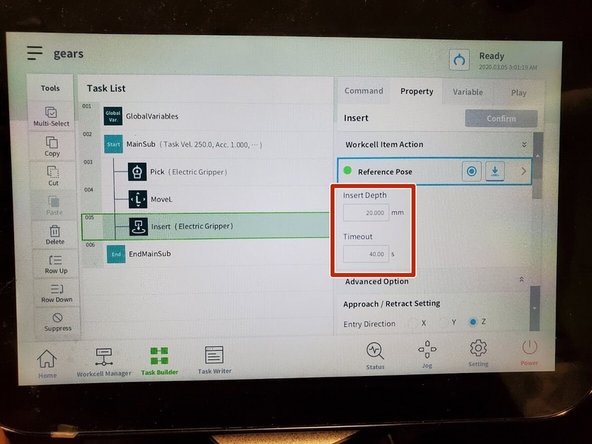
Add “Insert” skill and move to the insert pose then click on Reference Pose ʘ located in Property tab
-
-
-
The Insert Depth is very important. when is set too high or too low collisions will be an issue and the inserting force and compliance control will not work properly.
-
(This skill is very sensitive to every mm added or subtracted in the Insert Depth box). Also make sure to give enough time to Timeout so the searching motion could be done successfully in difficult cases
-
-
-
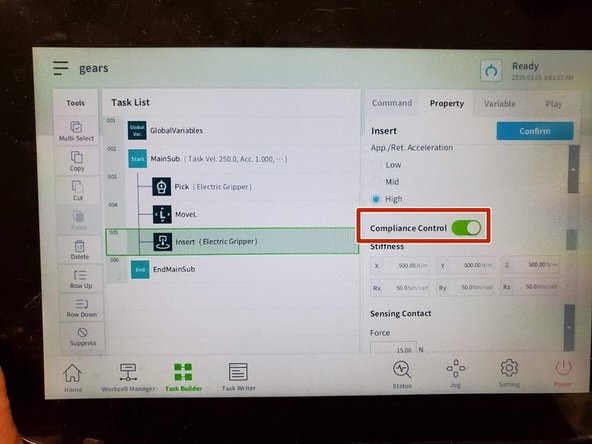
Compliance Control MUST be enable
-
-
-
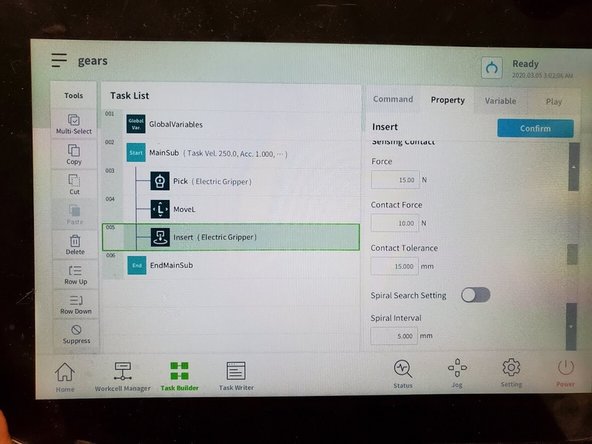
Spiral Search is not necessary in this task but you can play with it (Optional)
-
-
-
confirm, save, and test
-
This task requires some trial and error.
-