
-
-
Tap on Workcell Manager
-
Servo Must On for Workcell Manager Selectable
-
-
-
Tap on the + icon
-
-
-
Select Feeder and choose the type of grid
-
Then tap on Select
-
-
-
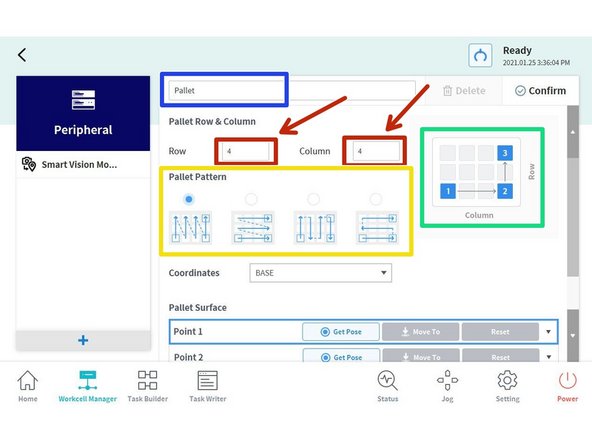
Set the number of rows and columns
-
Name the pallet
-
Select the Pattern
-
Teach the three reference poses (go to the next Step)
-
-
-
Teach the three corners (1, 2 and 3) of the pallet.
-
To teach points 1, 2, and 3 Tap on Get Pose once the tool is in the corresponding position.
-
-
-
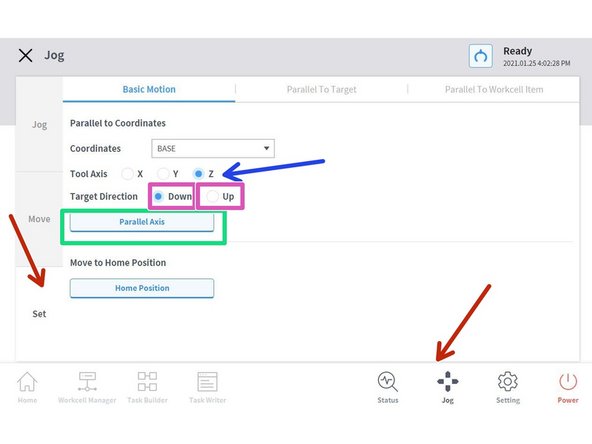
Tap on Jog and then go to the Set tab
-
Select (in this case base in our TCP) Z Tool Axis
-
Tap and hold Parallel Axis
-
You can change Up or Down depending on the tool orientation configuration.
-
-
-
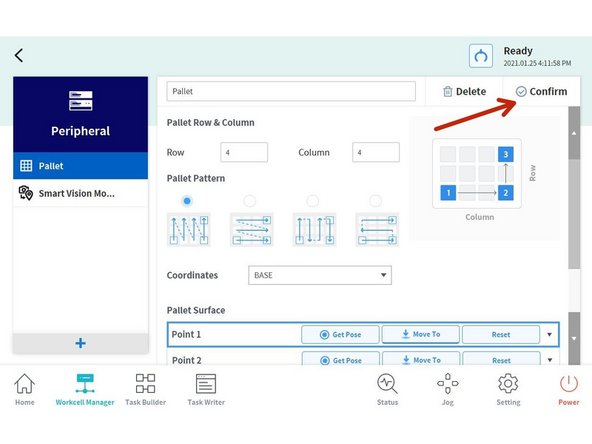
Confirm to save the changes
-
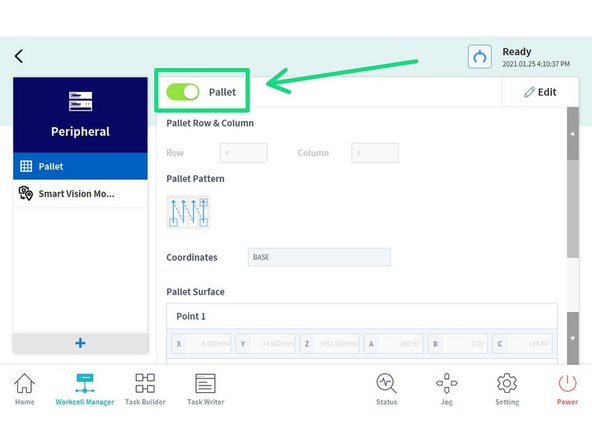
Enable the pallet
-
-
-
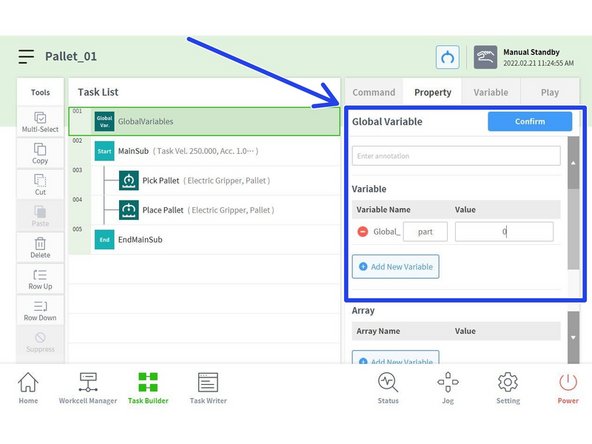
Tap on Variable and Add New Variable
-
add a name and a value, then confirm
-
-
-
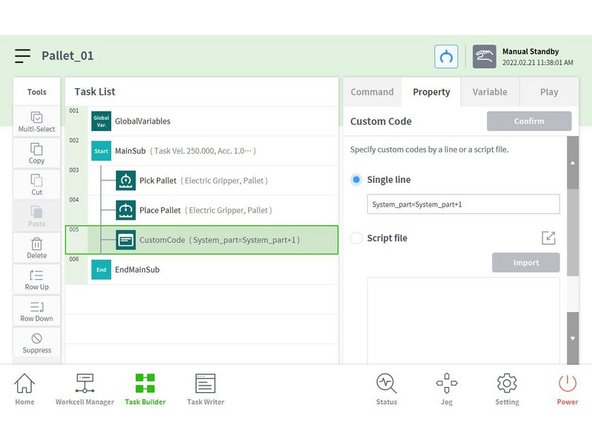
Add a CustomCode command
-
-
-
Tap on single line
-
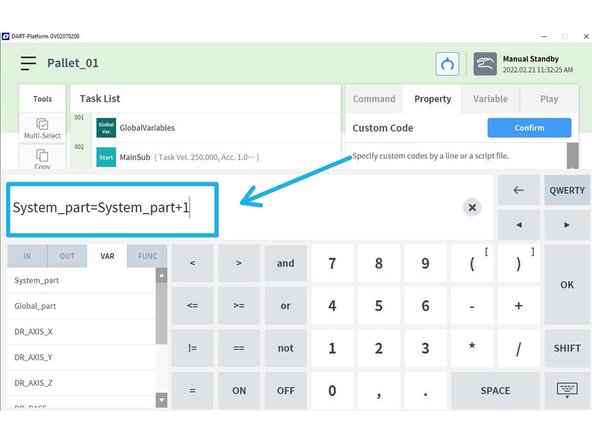
Select your System or Global variable
-
The Global Variable resets when the program stops
-
The System variable has to be reset manually. eg above MainSub (it only runs once) System_part=0
-
Type System_xxx=System_xxx+1
-
E.g. System_part=System_part+1or Global_Part=Global_Part+1
-
Tap on OK and Confirm
-
Every time the cycle repeats the counter value will increment +1
-








Cancel: I did not complete this guide.
One other person completed this guide.
