-
-
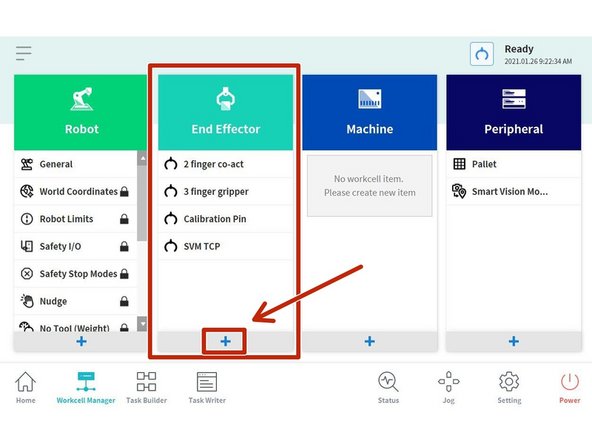
Tap on End Effector or go to the Workcell Manager and Tap on the + icon on the End Effector section
-
-
-
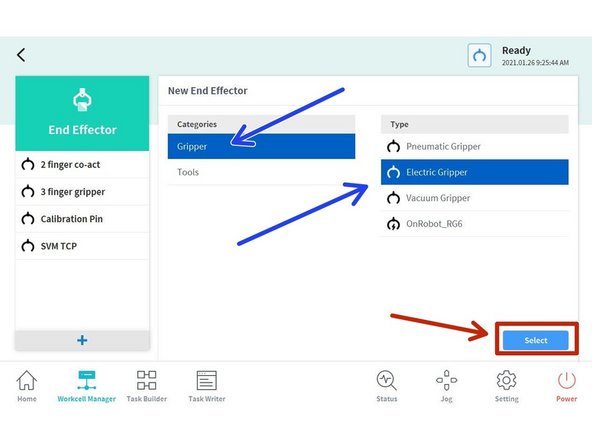
Select the Tool or Gripper
-
Select the Type of Tool or Gripper
-
Tap on Select
-
-
-
Disable the buttons, if the gripper/tool doesn't have sensors
-
-
-
Select where the Output signal comes from
-
I/O Cobot Controller (for this guide)
-
Flange
-
Or Modbus
-
-
-
Select the output signals to Grasp and Release depending on the gripper/solenoid/tool configuration
-
Output 1 to Grasp
-
Output 2 to Release
-
-
-
Tap Grasp or Release to send the pulse to the Outputs to test the Gripper / Tool / Solenoid
-
Go to the Status window
-
Manually turn ON/OFF the output signals
-
If the end effector has sensors the input signals can be read in this section.
-
Flange digital inputs and outputs can be monitored in this window as well.
-
-
-
Name the End Effector
-
Confirm it
-
-
-
Tap the button to enable the end effector
-
You can also set the TCP (Tool Center Position)
-