-
-
Create a new task in Task Builder
-
Make Sure to Select a Tool Weight, Gripper, and Pallet Workcell Item.
-
Make sure that the pallet that was previously created is enabled.
-
-
-
Go to Property and enable the Repeat Variable. gLoopCountRev
-
Set a Counter number or Infinite Loops
-
-
-
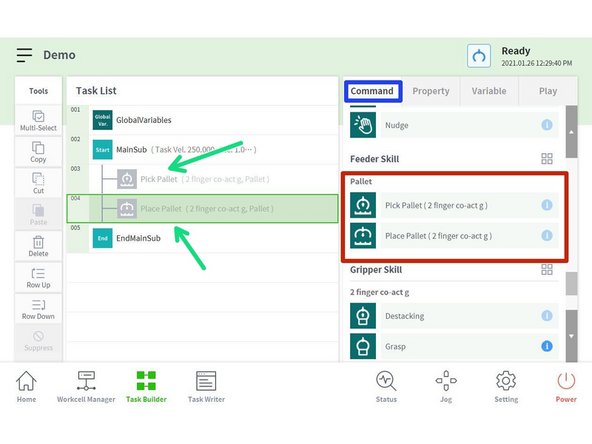
Lookup for Feeder Skill in the command section
-
Tap on the Pick Pallet and Place Pallet''' Feeder Skill
-
Pick Pallet and Place Pallet skills will show on the Task List
-
-
-
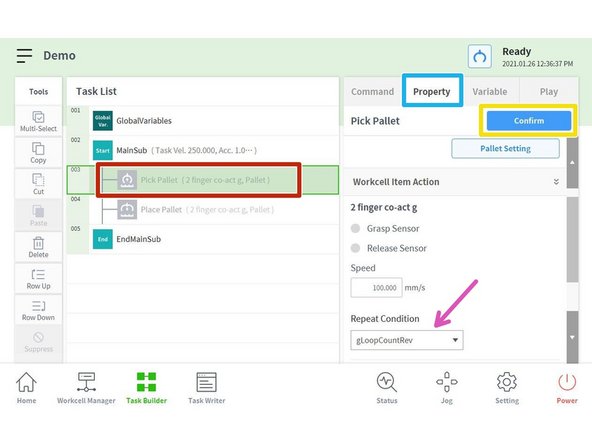
Tap on the skill that needs to be set with the variable
-
Tap on the Property Tab
-
Select the Repeat Condition Variable variable gLoopCountRev
-
Confirm the changes
-
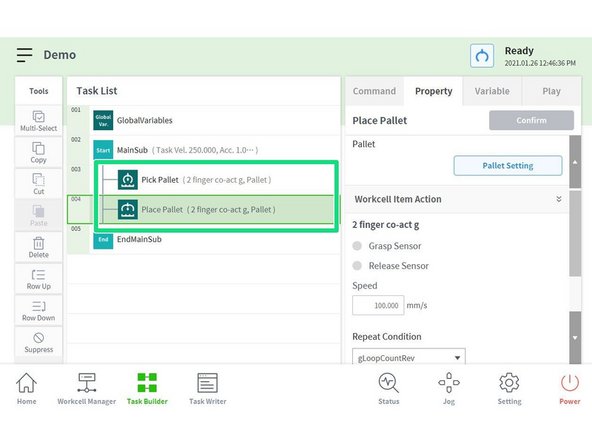
Once both skills are set the will turn green.
-
-
-
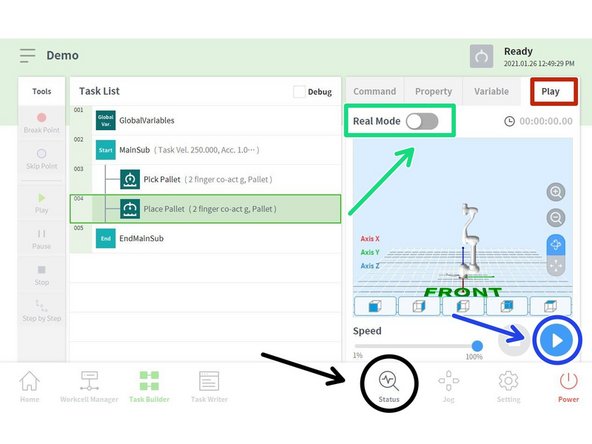
Tap on the Play tab
-
Make sure that the Servo is ON in Status window
-
Play and run a simulation
-
Then enable Real Mode and Play it again
-
E-Stop the Robot if necessary to prevent collisions or if something goes wrong.
-